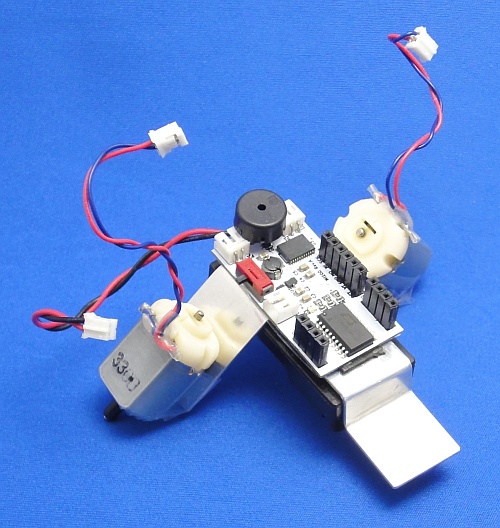
無線ロボットのMI100で使っているマイコンモジュールやモーターを市販のブロックにつけることができるように改造できます。MI100をブロックにつけると、ブロックで作った動く「モノ」をパソコンなどで実行させるRubyプログラミンで動かすことができます。ここでは改造の手順を説明します。
準備
![]() ハサミなどでけがをしないように、注意してゆっくりとていねいに作業しましょう。
ハサミなどでけがをしないように、注意してゆっくりとていねいに作業しましょう。
- MI100無線ロボット
- 2 x 4 タイルブロック 2個
- 2 x 2 タイルブロック 2個
- 8歯ギア 2個
- 厚さ0.8ミリから1ミリほど、幅12ミリほどの両面テープ
- 変色・変質しにくい透明テープ (セロテープで代用可)
- 絶縁(ぜつえん)ビニールテープ (電気を通さないテープ)
- ハサミ
- 鉛筆または細い油性マーカー
- 定規


MI100の解体
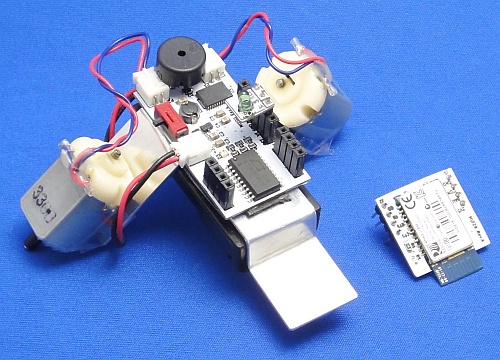
無線モジュールを抜く
![]()
無線モジュールのアンテナ(青い板の部分)がうすいので、ていねいに扱いましょう。
無線モジュールの基板(白い板の部分)の両はじを持って、ゆっくり上に引き抜きます。
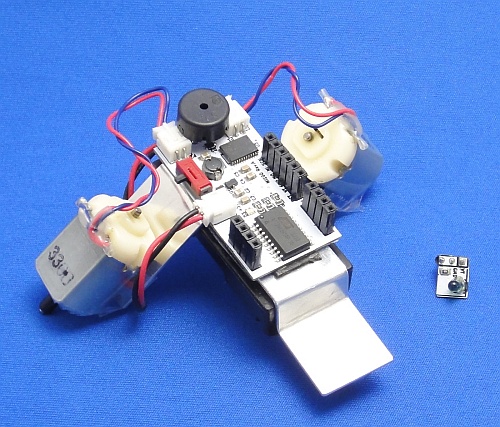
光センサーを抜く
光センサー基板の両はじを持って、ゆっくり上に引き抜きます。
コードを抜く
電池ボックスの電源コード、左右のモーターのコード合わせて3本のコードをマイコンモジュールから抜き取ります。少し斜め下に向けてゆっくり引き抜きます。